Summary
Keywords
Full Transcript
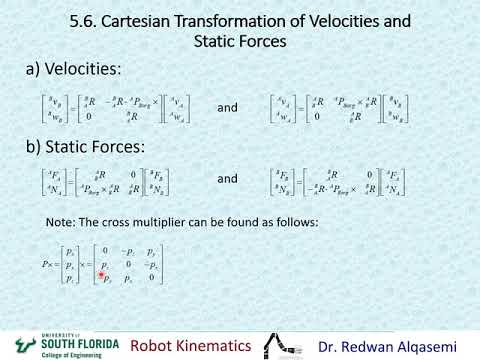
Ch5 Part 5: This video shows how we can transform static forces-moments and linear-angular velocities from one frame to another in the context of robot manipulators, with examples, and it shows some relevant Matlab-Robotics Toolbox commands for this chapter (video 1 of 1). Chapter 5: Cartesian Transformation of Velocities and Static Forces (John Craig’s Introduction to Robotics book). Video sequence: (Ch5 Part 4b) video comes before this video, and (CompEx Part 1) video comes after this video. Here are the homework problems required for this chapter (from the reference textbook book described below): Problems: 1, 2, 7, 11, 13, 15, Matlab Exercises: 5. TEXTBOOK REFERENCE: Introduction to Robotics - Mechanics and Control, by John Craig, 4th Edition, Pearson Education, Inc. Hoboken, NJ 07030, USA.

Continue this lesson in the app
Install CourseHive on Android or iOS to keep learning while you move.

