Summary
Keywords
Full Transcript
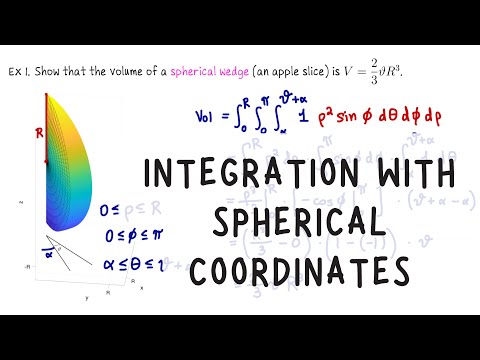
We use spherical coordinates to solve three distinct integration problems: calculating the volume of a spherical wedge, determining the volume of a solid bounded by a cone and a sphere, and computing the mass of a body with a given density function between two spheres. These examples illustrate the efficiency of spherical coordinates in handling integrals over spherical domains. The coordinates: - Radius (𝜌) Definition: In all examples, 𝜌 represents the radial distance from the origin to a point. - Angle 𝜙 Definition: 𝜙 is defined as the angle from the positive 𝑧-axis, analogous to latitude. - Angle 𝜃 Definition: 𝜃 represents the rotational angle in the 𝑥𝑦-plane, analogous to longitude. Example 1: Spherical Wedge Volume. In this example, we aim to calculate the volume of a spherical wedge, resembling a slice of an apple. Radius (𝜌) Bounds: The bounds for 𝜌 are chosen from the origin (0) to the outer surface of the sphere (R). This is because 𝜌 represents the distance from the origin to any point within the sphere, and in this case, we are considering the entire radius of the sphere. Angle 𝜙 Bounds: The bounds for 𝜙 are set from 0 to 𝜋. This is because 𝜙 measures the angle from the positive 𝑧-axis, and in the case of a full spherical wedge, it encompasses the whole range from the North Pole (0) to the South Pole (𝜋) of the sphere. Angle 𝜃 Bounds: The bounds for 𝜃 are determined by the angular width of the wedge in the 𝑥𝑦-plane. In this example, 𝜃 ranges from 𝛼 to 𝛼 plus the slice angle, defining the specific segment of the sphere being considered. Example 2: Volume of Solid Bounded by Cone and Sphere. In the second example, we calculate the volume of a solid bounded by a cone and a sphere in the first octant. Radius (𝜌) Bounds: The 𝜌 bounds are from 0 to 8‾√, representing the distance from the origin to the surface of the sphere (the boundary of the solid). This spherical radius encompasses the entire solid region within the sphere. Angle 𝜙 Bounds: The 𝜙 bounds are from 0 to 𝜋/4, which corresponds to the angle of the cone. Since the solid is bounded by the cone, 𝜙 must be within this range to stay within the conical section. Angle 𝜃 Bounds: The 𝜃 bounds are from 0 to 𝜋/2, as the region is confined to the first octant. This range in 𝜃 ensures that only the part of the solid in the first octant is considered, corresponding to a quarter of a full rotation in the 𝑥𝑦-plane. Example 3: Mass Calculation for a Body Between Two Spheres. The third example focuses on calculating the mass of a body located between two concentric upper hemispheres. Radius (𝜌) Bounds: The bounds for 𝜌 are chosen from 1 to 3, corresponding to the radii of the inner and outer spheres, respectively. This range of 𝜌 ensures that the entire region between the two spheres is covered. Angle 𝜙 Bounds: The 𝜙 bounds are set from 0 to 𝜋/2, as we are only considering the upper half of the spheres (above the 𝑥𝑦-plane). This range in 𝜙 captures the northern hemisphere of the spherical region. Angle 𝜃 Bounds: The bounds for 𝜃 are from 0 to 2𝜋, as there is no angular constraint in the 𝑥𝑦-plane. This full rotation ensures that the entire upper hemispheres of both spheres are included in the calculation. Multivariable Calculus Unit 5 Lecture 5. #mathematics #multivariablecalculus #SphericalCoordinates #mathematicstutorials #tripleintegral #tripleintegration #matheducation #physicseducation #polarcoordinates #engineeringmath #iitjammathematics #calculus3

Continue this lesson in the app
Install CourseHive on Android or iOS to keep learning while you move.





